KR5_01 軽SUV ロングボティ
クロカン4WDっぽい風貌をした軽ビッグフットトールワゴン。現車で例えると、なんちゃって「トヨタ ランドクルーザー プラド」ミニ。
スペック (Spec)
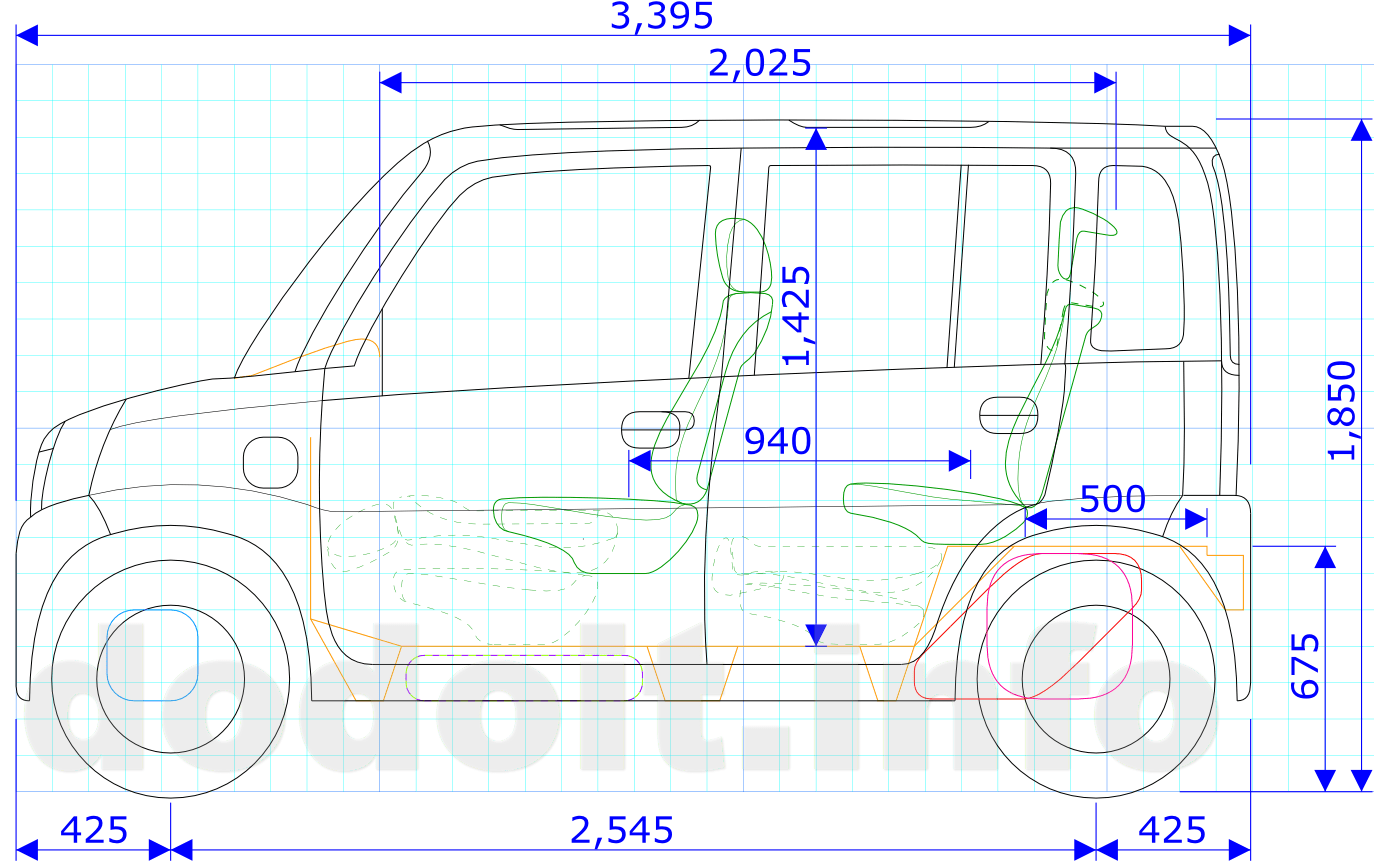
| 全長×全幅×全高(mm) | 3395×1475×1850 |
|---|---|
| 室内長×室内幅×室内高(mm) | 2025×1295×1425 |
| オーバーハング[前/後](mm) | 425/425 |
| ホイールベース(mm) | 2545 |
| トレッド[前/後](mm) | 1300/1300 |
| 最低地上高(mm) | 200 |
| 乗車定員(名) | 4 |
| 車両重量(kg) | 1000 |
| 最小回転半径(m) | 5.0 |
| タイヤサイズ | 155/80R16 |
| エンジン型式 | 直列2気筒横置インタークーラーターボディーゼル |
| 内径×行程(mm) | 69.6×86.6 |
| 総排気量(cc) | 659 |
| 圧縮比 | 14.0 |
| 最高出力(kW(PS)/rpm) | 40(54)/4800 |
| 最大トルク(N・m(kg・m)/rpm) | 88(9.0)/3000 |
| モーター最高出力(kW(PS)/rpm) | 10(14)/1200 ×3(フロント2、リヤ1) |
| モーター最大トルク(N・m(kg・m)/rpm) | 159(16.2)/0~600 ×3(フロント2、リヤ1) |
| 燃料消費率JC08モード(km/l) | 40.0 |
| JC08モードの重量区分 | 971~1080kg |
| 標準価格 | 190万円 |

スタイリング (Styling)
クロスカントリー4WDチックなスタイルにハイトワゴンのユーティリティを。
大径タイヤの採用で見かけはオフロード4WDのようなイメージに仕上げていますが、キャビン周りは普通にワゴンです。
下半身は大径タイヤとブリスターフェンダーでタイヤの存在感を強調。さらに、骨太感を演出しています。
一方、上半身はKF1_01 軽乗用ハイトワゴンのイメージを踏襲するユースフルなハイトワゴンのまさしくそれ。
そして、各ウインドウとピラーを立てた全高1850mmを誇るの堂々とした体格は、現在の流麗なクーペのように華奢で都会的なイメージのSUVに対するアンチテーゼ。
パッケージング (Packaging)
外見はヘビーデューティ4WDを装っていますが、いわゆる「SUV」、「なんちゃってクロカン4WD」です。
基となるKR1型プラットホームをタイヤの大径化に合わせて50mm上昇。いちおうSUVとして最低地上高ならびに床下のクリアランスを増やしています。
また、大径タイヤを軽規格に収めるためにホイールベースを110mm短縮しました。タイヤハウスが大きくなる分、室内へのタイヤハウスの張り出しが大きくなり、前席足元とラゲッジスペースを中心に影響が出ます。
このデメリットを打ち消すためによりアップライトなシーティングポジションを採用。高さ方向に逃げることで狭くなることを回避しています。
この結果、標準的なトールワゴンの室内空間と同等の空間を保持しながらSUV化に成功。逆に言うと、軽SUVとしては抜群の室内空間を確保しています。
リヤミッドシップエンジンレイアウトを採用したのは、小回り性確保のため。フロントエンジンに大径タイヤではエンジンを縦置きにしないと成立しません。縦置きレイアウトをわざわざ開発するなら、既にあるリヤミッドシップを流用しようというわけです。
タイヤは大径ではありますが、幅155mmの至って標準的な軽自動車と同一のサイズです。本格4WDでは無いので、無駄に太いタイヤはパッケージングへの影響が大きいだけでなく、プラットホームの流用性も落としますのでここではなるべく影響を減らすべく幅を取らないタイヤとしています。
さきほどから、本格4WDでは無いということを度々記述していますが、その理由を記したいと思います。
まず、そもそもエンジンの搭載位置が低すぎるということがあります。特に厳密にいうとエアインテークの位置が高くできません。
本格4WDではある程度の水深の川などでも走行ができるように空気取り入れ口を地上1m程度の高さに持ち上げていますが、リヤミッドシップ床下配置のレイアウトではエンジンルームが地上高675mmまでに抑えられているため無理があります。
また、駆動系についても、機械的に結合された4WDシステムを持ち合わせていません。強度的にも乗用のプラットホームとなんら変わらなく、本格4WDとするには軟弱に過ぎます。
また、長くとったホイールベースは「ランブレークオーバーアングル」を減少させます。これは例えば、急激な上り坂から急に平坦なところに出た際に下腹を擦らずに済む性能を指し、大きめの突起物を乗り越えるときの指標のひとつにもなります。つまり、ホイールベースが長くなると座礁する危険性という観点で凸凹に弱くなります。
弱点ばかり挙げるのもなんなので、進化した部分も挙げたいと思います。
やはり前後にモーターを持っているということ。特に前輪には左右輪個別にモーター動力を与えて、トルク制御が出来ると良いなあと思っています。
どういうことかといいますと、ハンドル角やすべり量に応じてトルク出力を制御するということで、例えばぬかるみ脱出などでは滑らない程度にトルクの発生を抑えて、滑っていない方も車速に合わせてトルクを調節するという具合です。
場合によっては、左右輪のトルク発生量を同じに制御してLSD(リミテッドスリップデフ)と同じ効果を生み出すこともできます。後輪へのトルクに合わせるように制御することでデフロックと同じ効果を生み出すこともできます。
また、左右のトルク発生量に意図的に差を持たせることで旋回することもできます。
今回はそこまでするつもりはありませんが、ステアリングシャフトを廃止して、左右輪のトルク制御だけでハンドリングを行うという未来図が描けます。さらには4輪全てが個別のモーター制御になれば、制御の自由度ももっと増します。
モーターなら空気取り入れ口なども不要かと思いますので、防水をきちっとすれば、本格4WDに新たな世界が広がるほどの革新が起こされるのではないかと思います。ま、今回はまだ電気自動車ではなくハイブリッドですので、そこまでできませんが。
エンジン (Engine)
e-4WDが前提となりますのでハイブリッドが標準です。
| 影響を受けた現車 | トヨタ ランドクルーザー・プラド('96・90系) |
|---|---|
| 参考にした現車 | ? |
| 近しい現車 | ? |